注意
转到结尾下载完整示例代码。
层归一化¶
在本教程中,您将编写一个比 PyTorch 实现运行速度更快的高性能层归一化(Layer Normalization)内核。
通过本教程,您将了解到
在 Triton 中实现反向传播。
在 Triton 中实现并行规约(parallel reduction)。
动机¶
LayerNorm 算子最初是在 [BA2016] 中引入的,旨在提高序列模型(例如,Transformer)或小批量(small batch size)神经网络的性能。它接收一个向量 \(x\) 作为输入,并生成一个形状相同的向量 \(y\) 作为输出。归一化是通过减去 \(x\) 的均值并除以其标准差来完成的。归一化之后,会应用一个带有可学习权重 \(w\) 和偏置 \(b\) 的线性变换。其前向传播过程可以表示为:
其中 \(\epsilon\) 是一个为保证数值稳定性而加到分母上的小常数。我们先来看一下前向传播的实现。
import torch
import triton
import triton.language as tl
try:
# This is https://github.com/NVIDIA/apex, NOT the apex on PyPi, so it
# should not be added to extras_require in setup.py.
import apex
HAS_APEX = True
except ModuleNotFoundError:
HAS_APEX = False
DEVICE = triton.runtime.driver.active.get_active_torch_device()
@triton.jit
def _layer_norm_fwd_fused(
X, # pointer to the input
Y, # pointer to the output
W, # pointer to the weights
B, # pointer to the biases
Mean, # pointer to the mean
Rstd, # pointer to the 1/std
stride, # how much to increase the pointer when moving by 1 row
N, # number of columns in X
eps, # epsilon to avoid division by zero
BLOCK_SIZE: tl.constexpr,
):
# Map the program id to the row of X and Y it should compute.
row = tl.program_id(0)
Y += row * stride
X += row * stride
# Compute mean
mean = 0
_mean = tl.zeros([BLOCK_SIZE], dtype=tl.float32)
for off in range(0, N, BLOCK_SIZE):
cols = off + tl.arange(0, BLOCK_SIZE)
a = tl.load(X + cols, mask=cols < N, other=0.).to(tl.float32)
_mean += a
mean = tl.sum(_mean, axis=0) / N
# Compute variance
_var = tl.zeros([BLOCK_SIZE], dtype=tl.float32)
for off in range(0, N, BLOCK_SIZE):
cols = off + tl.arange(0, BLOCK_SIZE)
x = tl.load(X + cols, mask=cols < N, other=0.).to(tl.float32)
x = tl.where(cols < N, x - mean, 0.)
_var += x * x
var = tl.sum(_var, axis=0) / N
rstd = 1 / tl.sqrt(var + eps)
# Write mean / rstd
tl.store(Mean + row, mean)
tl.store(Rstd + row, rstd)
# Normalize and apply linear transformation
for off in range(0, N, BLOCK_SIZE):
cols = off + tl.arange(0, BLOCK_SIZE)
mask = cols < N
w = tl.load(W + cols, mask=mask)
b = tl.load(B + cols, mask=mask)
x = tl.load(X + cols, mask=mask, other=0.).to(tl.float32)
x_hat = (x - mean) * rstd
y = x_hat * w + b
# Write output
tl.store(Y + cols, y, mask=mask)
反向传播¶
层归一化算子的反向传播比前向传播要复杂一些。设 \(\hat{x}\) 为线性变换前经过归一化的输入,即 \(\frac{ x - \text{E}[x] }{ \sqrt{\text{Var}(x) + \epsilon} }\),则 \(x\) 的向量-雅可比积(VJP) \(\nabla_{x}\) 由以下公式给出:
其中 \(\odot\) 表示逐元素乘法(element-wise multiplication),\(\cdot\) 表示点积(dot product),\(\sigma\) 是标准差。\(c_1\) 和 \(c_2\) 是为了提高后续实现代码可读性的中间常量。
对于权重 \(w\) 和偏置 \(b\),其 VJP \(\nabla_{w}\) 和 \(\nabla_{b}\) 的计算则更为直接:
由于同一批次中的所有行都使用相同的权重 \(w\) 和偏置 \(b\),因此它们的梯度需要累加起来。为了高效地执行这一步,我们采用了一种并行规约(parallel reduction)策略:每个内核实例将某些行上的部分 \(\nabla_{w}\) 和 \(\nabla_{b}\) 累加到 \(\text{GROUP_SIZE_M}\) 个独立缓冲区中的一个。这些缓冲区保留在 L2 缓存中,然后由另一个函数进一步规约,以计算出最终的 \(\nabla_{w}\) 和 \(\nabla_{b}\)。
假设输入行数 \(M = 4\) 且 \(\text{GROUP_SIZE_M} = 2\),以下是针对 \(\nabla_{w}\) 的并行规约策略示意图(为简洁起见,省略了 \(\nabla_{b}\)):
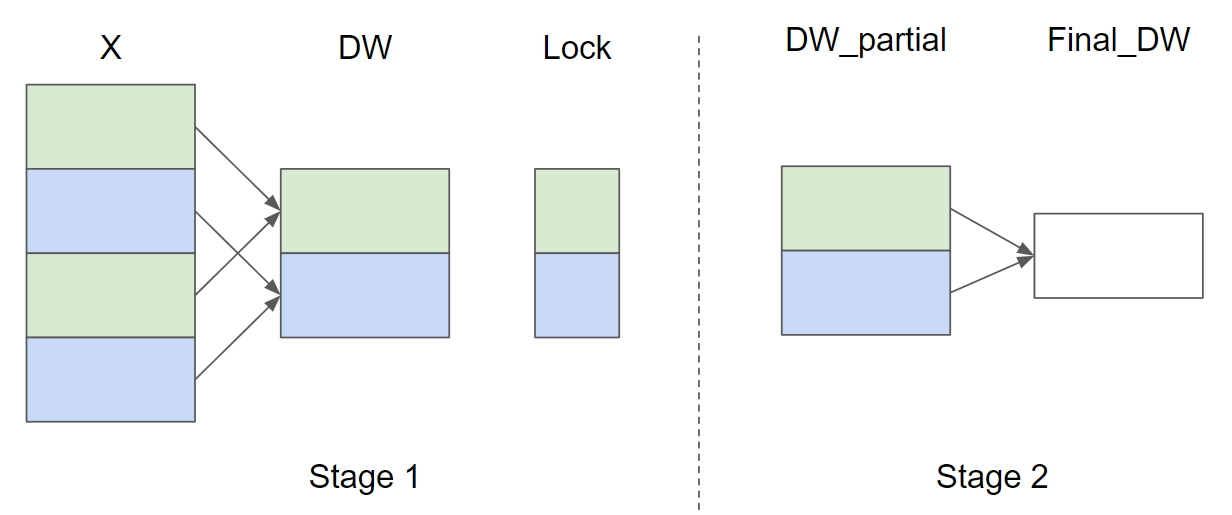
在阶段 1 中,颜色相同的 X 行共享同一个缓冲区,因此使用锁来确保在任何时候只有一个内核实例向该缓冲区写入数据。在阶段 2 中,这些缓冲区被进一步规约,以计算出最终的 \(\nabla_{w}\) 和 \(\nabla_{b}\)。在下面的实现中,阶段 1 由函数 _layer_norm_bwd_dx_fused 实现,阶段 2 由函数 _layer_norm_bwd_dwdb 实现。
@triton.jit
def _layer_norm_bwd_dx_fused(DX, # pointer to the input gradient
DY, # pointer to the output gradient
DW, # pointer to the partial sum of weights gradient
DB, # pointer to the partial sum of biases gradient
X, # pointer to the input
W, # pointer to the weights
Mean, # pointer to the mean
Rstd, # pointer to the 1/std
Lock, # pointer to the lock
stride, # how much to increase the pointer when moving by 1 row
N, # number of columns in X
GROUP_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr):
# Map the program id to the elements of X, DX, and DY it should compute.
row = tl.program_id(0)
cols = tl.arange(0, BLOCK_SIZE_N)
mask = cols < N
X += row * stride
DY += row * stride
DX += row * stride
# Offset locks and weights/biases gradient pointer for parallel reduction
lock_id = row % GROUP_SIZE_M
Lock += lock_id
Count = Lock + GROUP_SIZE_M
DW = DW + lock_id * N + cols
DB = DB + lock_id * N + cols
# Load data to SRAM
x = tl.load(X + cols, mask=mask, other=0).to(tl.float32)
dy = tl.load(DY + cols, mask=mask, other=0).to(tl.float32)
w = tl.load(W + cols, mask=mask).to(tl.float32)
mean = tl.load(Mean + row)
rstd = tl.load(Rstd + row)
# Compute dx
xhat = (x - mean) * rstd
wdy = w * dy
xhat = tl.where(mask, xhat, 0.)
wdy = tl.where(mask, wdy, 0.)
c1 = tl.sum(xhat * wdy, axis=0) / N
c2 = tl.sum(wdy, axis=0) / N
dx = (wdy - (xhat * c1 + c2)) * rstd
# Write dx
tl.store(DX + cols, dx, mask=mask)
# Accumulate partial sums for dw/db
partial_dw = (dy * xhat).to(w.dtype)
partial_db = (dy).to(w.dtype)
while tl.atomic_cas(Lock, 0, 1) == 1:
pass
count = tl.load(Count)
# First store doesn't accumulate
if count == 0:
tl.atomic_xchg(Count, 1)
else:
partial_dw += tl.load(DW, mask=mask)
partial_db += tl.load(DB, mask=mask)
tl.store(DW, partial_dw, mask=mask)
tl.store(DB, partial_db, mask=mask)
# need a barrier to ensure all threads finished before
# releasing the lock
tl.debug_barrier()
# Release the lock
tl.atomic_xchg(Lock, 0)
@triton.jit
def _layer_norm_bwd_dwdb(DW, # pointer to the partial sum of weights gradient
DB, # pointer to the partial sum of biases gradient
FINAL_DW, # pointer to the weights gradient
FINAL_DB, # pointer to the biases gradient
M, # GROUP_SIZE_M
N, # number of columns
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr):
# Map the program id to the elements of DW and DB it should compute.
pid = tl.program_id(0)
cols = pid * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)
dw = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
db = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
# Iterate through the rows of DW and DB to sum the partial sums.
for i in range(0, M, BLOCK_SIZE_M):
rows = i + tl.arange(0, BLOCK_SIZE_M)
mask = (rows[:, None] < M) & (cols[None, :] < N)
offs = rows[:, None] * N + cols[None, :]
dw += tl.load(DW + offs, mask=mask, other=0.)
db += tl.load(DB + offs, mask=mask, other=0.)
# Write the final sum to the output.
sum_dw = tl.sum(dw, axis=0)
sum_db = tl.sum(db, axis=0)
tl.store(FINAL_DW + cols, sum_dw, mask=cols < N)
tl.store(FINAL_DB + cols, sum_db, mask=cols < N)
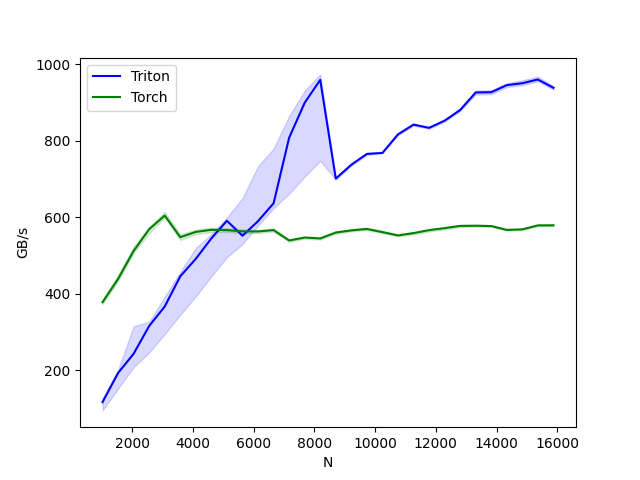
基准测试¶
现在,我们可以将我们内核的性能与 PyTorch 的性能进行比较。这里我们主要关注每个特征少于 64KB 的输入。具体来说,可以通过设置 'mode': 'backward' 来对反向传播进行基准测试。
class LayerNorm(torch.autograd.Function):
@staticmethod
def forward(ctx, x, normalized_shape, weight, bias, eps):
# allocate output
y = torch.empty_like(x)
# reshape input data into 2D tensor
x_arg = x.reshape(-1, x.shape[-1])
M, N = x_arg.shape
mean = torch.empty((M, ), dtype=torch.float32, device=x.device)
rstd = torch.empty((M, ), dtype=torch.float32, device=x.device)
# Less than 64KB per feature: enqueue fused kernel
MAX_FUSED_SIZE = 65536 // x.element_size()
BLOCK_SIZE = min(MAX_FUSED_SIZE, triton.next_power_of_2(N))
if N > BLOCK_SIZE:
raise RuntimeError("This layer norm doesn't support feature dim >= 64KB.")
# heuristics for number of warps
num_warps = min(max(BLOCK_SIZE // 256, 1), 8)
# enqueue kernel
_layer_norm_fwd_fused[(M, )]( #
x_arg, y, weight, bias, mean, rstd, #
x_arg.stride(0), N, eps, #
BLOCK_SIZE=BLOCK_SIZE, num_warps=num_warps, num_ctas=1)
ctx.save_for_backward(x, weight, bias, mean, rstd)
ctx.BLOCK_SIZE = BLOCK_SIZE
ctx.num_warps = num_warps
ctx.eps = eps
return y
@staticmethod
def backward(ctx, dy):
x, w, b, m, v = ctx.saved_tensors
# heuristics for amount of parallel reduction stream for DW/DB
N = w.shape[0]
GROUP_SIZE_M = 64
if N <= 8192: GROUP_SIZE_M = 96
if N <= 4096: GROUP_SIZE_M = 128
if N <= 1024: GROUP_SIZE_M = 256
# allocate output
locks = torch.zeros(2 * GROUP_SIZE_M, dtype=torch.int32, device=w.device)
_dw = torch.zeros((GROUP_SIZE_M, N), dtype=x.dtype, device=w.device)
_db = torch.zeros((GROUP_SIZE_M, N), dtype=x.dtype, device=w.device)
dw = torch.empty((N, ), dtype=w.dtype, device=w.device)
db = torch.empty((N, ), dtype=w.dtype, device=w.device)
dx = torch.empty_like(dy)
# enqueue kernel using forward pass heuristics
# also compute partial sums for DW and DB
x_arg = x.reshape(-1, x.shape[-1])
M, N = x_arg.shape
_layer_norm_bwd_dx_fused[(M, )]( #
dx, dy, _dw, _db, x, w, m, v, locks, #
x_arg.stride(0), N, #
BLOCK_SIZE_N=ctx.BLOCK_SIZE, #
GROUP_SIZE_M=GROUP_SIZE_M, #
num_warps=ctx.num_warps)
grid = lambda meta: (triton.cdiv(N, meta['BLOCK_SIZE_N']), )
# accumulate partial sums in separate kernel
_layer_norm_bwd_dwdb[grid](
_dw, _db, dw, db, min(GROUP_SIZE_M, M), N, #
BLOCK_SIZE_M=32, #
BLOCK_SIZE_N=128, num_ctas=1)
return dx, None, dw, db, None
layer_norm = LayerNorm.apply
def test_layer_norm(M, N, dtype, eps=1e-5, device=DEVICE):
# create data
x_shape = (M, N)
w_shape = (x_shape[-1], )
weight = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
bias = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
x = -2.3 + 0.5 * torch.randn(x_shape, dtype=dtype, device=device)
dy = .1 * torch.randn_like(x)
x.requires_grad_(True)
# forward pass
y_tri = layer_norm(x, w_shape, weight, bias, eps)
y_ref = torch.nn.functional.layer_norm(x, w_shape, weight, bias, eps).to(dtype)
# backward pass (triton)
y_tri.backward(dy, retain_graph=True)
dx_tri, dw_tri, db_tri = [_.grad.clone() for _ in [x, weight, bias]]
x.grad, weight.grad, bias.grad = None, None, None
# backward pass (torch)
y_ref.backward(dy, retain_graph=True)
dx_ref, dw_ref, db_ref = [_.grad.clone() for _ in [x, weight, bias]]
# compare
assert torch.allclose(y_tri, y_ref, atol=1e-2, rtol=0)
assert torch.allclose(dx_tri, dx_ref, atol=1e-2, rtol=0)
assert torch.allclose(db_tri, db_ref, atol=1e-2, rtol=0)
assert torch.allclose(dw_tri, dw_ref, atol=1e-2, rtol=0)
@triton.testing.perf_report(
triton.testing.Benchmark(
x_names=['N'],
x_vals=[512 * i for i in range(2, 32)],
line_arg='provider',
line_vals=['triton', 'torch'] + (['apex'] if HAS_APEX else []),
line_names=['Triton', 'Torch'] + (['Apex'] if HAS_APEX else []),
styles=[('blue', '-'), ('green', '-'), ('orange', '-')],
ylabel='GB/s',
plot_name='layer-norm-backward',
args={'M': 4096, 'dtype': torch.float16, 'mode': 'backward'},
))
def bench_layer_norm(M, N, dtype, provider, mode='backward', eps=1e-5, device=DEVICE):
# create data
x_shape = (M, N)
w_shape = (x_shape[-1], )
weight = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
bias = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
x = -2.3 + 0.5 * torch.randn(x_shape, dtype=dtype, device=device)
dy = .1 * torch.randn_like(x)
x.requires_grad_(True)
quantiles = [0.5, 0.2, 0.8]
def y_fwd():
if provider == "triton":
return layer_norm(x, w_shape, weight, bias, eps) # noqa: F811, E704
if provider == "torch":
return torch.nn.functional.layer_norm(x, w_shape, weight, bias, eps) # noqa: F811, E704
if provider == "apex":
apex_layer_norm = (apex.normalization.FusedLayerNorm(w_shape).to(x.device).to(x.dtype))
return apex_layer_norm(x) # noqa: F811, E704
# forward pass
if mode == 'forward':
gbps = lambda ms: 2 * x.numel() * x.element_size() * 1e-9 / (ms * 1e-3)
ms, min_ms, max_ms = triton.testing.do_bench(y_fwd, quantiles=quantiles, rep=500)
# backward pass
if mode == 'backward':
y = y_fwd()
gbps = lambda ms: 3 * x.numel() * x.element_size() * 1e-9 / (ms * 1e-3) # noqa: F811, E704
ms, min_ms, max_ms = triton.testing.do_bench(lambda: y.backward(dy, retain_graph=True), quantiles=quantiles,
grad_to_none=[x], rep=500)
return gbps(ms), gbps(max_ms), gbps(min_ms)
test_layer_norm(1151, 8192, torch.float16)
bench_layer_norm.run(save_path='.', print_data=True)
layer-norm-backward:
N Triton Torch
0 1024.0 121.064037 372.363633
1 1536.0 179.824387 444.144584
2 2048.0 241.533170 517.389457
3 2560.0 337.582411 558.545450
4 3072.0 407.337026 585.142862
5 3584.0 500.093023 515.065851
6 4096.0 568.231237 522.893602
7 4608.0 582.063139 529.148312
8 5120.0 650.158735 543.716805
9 5632.0 703.999975 553.967224
10 6144.0 767.999973 563.885282
11 6656.0 840.757868 572.559140
12 7168.0 910.222229 547.872604
13 7680.0 945.230767 555.180730
14 8192.0 978.149241 561.737163
15 8704.0 694.006661 569.198909
16 9216.0 739.745803 575.999980
17 9728.0 762.980388 577.901003
18 10240.0 790.225053 579.622644
19 10752.0 784.340420 565.894726
20 11264.0 809.389194 570.329113
21 11776.0 853.848973 573.273800
22 12288.0 872.520678 583.984154
23 12800.0 887.861307 586.259571
24 13312.0 880.132233 586.216495
25 13824.0 894.274928 588.255332
26 14336.0 919.957230 576.321603
27 14848.0 952.812845 578.493529
28 15360.0 959.999966 587.006361
29 15872.0 949.945143 587.851864
参考文献¶
Jimmy Lei Ba and Jamie Ryan Kiros and Geoffrey E. Hinton, “Layer Normalization”, Arxiv 2016
脚本总运行时间: (0 分 29.256 秒)